Jumat, 04 April 2014
Cara membuat robot kreatif pemadam api
Sistem Kontrol Kontrol adalah bagian yang amat penting dalam robotik. Sistem robotik tanpa kontrol hanya akan menjadi benda mekatronik yang mati. Dalam sistem kontrol robotik terdapat dua bagian, yaitu perangkat keras elektronik, yakni rangkaian elektronik yang setidak-tidaknya terdiri dari rangkaian prosesor (CPU, memori, komponen interface input/output) dan perangkat lunak yang berisi program kemudi dan algoritma kontrol. Algoritma kontrol yang digunakan dalam dunia robotik biasanya adalah kontrol cerdas yang berdasarkan algoritma dipandang cerdas. Pengertian cerdas di sini sangatlah relatif, karena tergantung dari sisi mana seseorang memandang. Sistem kontrol yang digunakan pada robot yang dirancang merupakan gabungan dari sistemclose loop dan open loop dengan jenis kontrol ON/OFF. Sistem kontrol ON/OFF sering disebut juga “bang-bang control”, adalah kontrol yang paling dasar dalam robotik. Input sensor dan sinyal output pada aktuator dinyatakan hanya dalam dua keadaan, yaitu ON/OFFatau logika 1 dan 0. Dalam perancangan sistem robot yang dibangun, cara ini sudah cukup memadai karena mampu mengontrol robot untuk mencapai target yang dikehendaki. Mekanisme kerja dari sistem kontrol yang dirancang dapat diilustrasikan pada gambar berikut ini. Gambar 2.1. Mekanisme Kerja (Program) Kontroler Tiga prosedur utama, yaitu baca sensor, memproses data sensor, dan mengirim sinyal aktuasi ke aktuator adalah tugas utama kontroler. Dalam aplikasi, prosedur “baca sensor” dapat terdiri dari berbagai teknik yang masing-masing membawa dampak kerumitan dalam pemrograman. Kontroler yang digunakan dalam perancangan merupakan tipe kontroler yang menggunakan teknik polling dalam proses membaca dan menulis data pada port I/O. Teknik polling adalah prosedur membaca data berdasarkan pengalamatan langsung yang dapat dilakukan kapan saja kontroler menghendaki. Bagian yang berfungsi untuk memproses data sensor adalah bagian yang paling penting dalam program kontroler. Pada bagian ini semua data di proses, baik berupa data hasil bacaan sensor maupun berupa sinyal aktuasi ke aktuator. Berbagai algoritma kontrol mulai dari teknik klasik seperti kontrol ON/OFF, P, I, dan D dapat diterapkan. Jika dikehendaki kontrol yang lebih pintar dan dapat beradaptasi, maka dapat dimasukkan berbagai algoritma kontrol adaptive hingga teknik artificial intelligent seperti fuzzy control, neural network dan lain-lain. Bagian prosedur untuk “tulis data” adalah bagian yang berisi pengalamatan ke aktuator untuk proses penulisan data. Dalam konteks rangkaian elektronik, data ini adalah sinyal aktuasi ke kontroler seperti berapa besar tegangan atau arus yang mengalir ke motor, dan lain sebagainya. Mikrokontroler yang digunakan dalam perancangan sistem robot cerdas pemadam api ini yakni sebuah mikrokontroler Scenix SX48BD dengan modul pengendali Basic Stamp. Beberapa alasan utama pemilihan mikrokontroler Scenix SX48BD: 1. Bahasa pemrograman yang sederhana membuat pengembangan perangkat lunak menjadi lebih cepat. 2. Kecepatan tinggi dengan frekuensi clock 75 MHz. 3. Jumlah port I/O sebanyak 36 buah. 4. Kapasitas memori program EE/Flash 16 K Byte (8 K Word). 5. Memori data berukuran 262x8bit SRAM. 6. Rentang tegangan (Vcc) yang digunakan antara 3.0 – 5.5 volt tetapi umumnya menggunakan level tegangan 5 volt. 7. Suplai arus yang melewati Vcc maksimal sebesar 130 mA. Fitur-fitur lain yang dimiliki Scenix SX48BD adalah: 1. 13.3 ns untuk satu siklus instruksi 2. Merupakan mikrokontroler RISC, sehingga memiliki 43 single-word instruksi dasar. 3. 8-bit Real Time Clock/Counter (RTCC) dengan 8-bit prescaler terprogram. 4. Watchdog Timer dengan isolator internal yang mempunyai frekuensi antara 31.25 kHz sampai 4 MHz. Arsitektur keluarga SX menggunakan modifikasi arsitektur Harvard. Arsitektur ini menggunakan dua memori terpisah dengan bus alamat yang terpisah, satu untuk program dan satu untuk data yang mengizinkan transfer data dari memori program ke SRAM. Kemampuan ini mengizinkan pengaksesan data dari memori program. Keuntungan dari arsitektur ini adalah transfer instruksi fetch dan memori dapat di overlap dengan sebuahmulti-stage pipeline (fetch, decode, execute dan write back), yang berarti instruksi selanjutnya dapat di-fetch dari memori program ketika instruksi sekarang sedang dieksekusi menggunakan data dari memori data. 2.3. Mekanik Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik. Robot yang memiliki kemampuan navigasi dan manipulasi secara relatif memiliki konstruksi mekanik yang lebih rumit dibanding dengan yang berkemampuan navigasi saja, seperti mobile robot yang hanya memiliki roda penggerak. Hal mendasar yang perlu diperhatikan dalam disain mekanik robot adalah perhitungan kebutuhan torsi untuk menggerakkan sendi atau roda. Motor, sebagai penggerak utama (prime-mover) yang paling sering dipakai umumnya akan bekerja optimal pada putaran yang relatif tinggi. Hal ini tidak sesuai bila porosnya dihubungkan langsung ke sendi gerak atau roda. Sebab kebanyakan gerakan yang diperlukan pada sisi anggota badan robot adalah relatif pelan namun bertenaga. Untuk itu diperlukan cara-cara transmisi daya motor (atauaktuator secara umum) secara tepat. Salah satu metoda yang paling umum adalah menggunakan sistem gear. Gambar 2.2. Penggunaan Transmisi Gir Hubungan Langsung Arah putaran poros pada transmisi gir hubungan langsung seperti pada Gambar 2.2 adalah selalu berlawanan untuk tiap Sambungan serial. Untuk mendapatkan arah putaran yang sama seperti pada poros motor maka gir harus disusun dengan jumlah ganjil. Pada Robot Cerdas Pemadam Api yang dirancang menggunakan transmisi gir hubungan langsung dengan perbandingan 1:100. Hal ini disebabkan karena sistem ini cukup mudah instalasinya dan untuk mendapatkan rasio gir yang besar dicapai dengan memperbanyak susunan gir yang arsitekturnya dapat dibuat ringkas dalam “satu rumah”. Sistem roda yang digunakan pada Robot Cerdas Pemadam Api berbasis rantai seperti tank. Roda yang dihubungkan menggunakan rantai digerakkan menggunakan dua buah motor yang dipasang di roda paling belakang sebelah kiri dan kanan. Hal ini didasarkan atas bentuk dan kondisi medan tempat robot bergerak. 2.4. Sensor Sensor pada robot merupakan perangkat atau komponen pengumpul informasi lingkungan tempat robot berada. Berdasarkan masukan sensor-sensor yang terpasang, unit mikrokontroler dapat menganalisanya dan menentukan keputusan yang tepat sesuai dengan algoritma yang telah dirancang. Sensor yang digunakan dapat berupa sensor yang dibuat dari sistem yang paling sederhana seperti sensor ON/OFF menggunakan limit switch, sistem analog, sistem bus parallel, sistem bus serial, hingga sistem mata kamera yang masing-masing cara pengukuran dan cara interfacing ke kontrolernya berbeda-beda. Dalam pemilihan jenis sensor yang akan digunakan pada sebuah sistem robot, bergantung pada aplikasi dari robot yang akan dirancang. Robot yang dirancang dengan tujuan ikut serta dalam Kontes Robot Cerdas Indonesia dengan tema Robot Cerdas Pemadam Api menggunakan beberapa sensor, diantaranya : 1. Sensor Dinding 2. Sensor Kipas 3. Sensor Api 4. Sensor Suara 2.4.1 Sensor Dinding Sensor dinding merupakan sensor yang digunakan untuk keperluan navigasi robot agar robot tidak menabrak dinding pada saat menyusuri arena kontes. Sensor yang dapat digunakan adalah : v Ping))) Ultrasonic Distance Sensor Ping))) Ultrasonic Distance Sensor ini adalah jenis sensor sonar (sistem pemancar dan penerima sinyal sonar) buatan parallax dengan sistem TX-RX ultrasonic yang didesain dengan tingkat kepresisian tinggi dan menyatu dengan rangkaian signal conditioning-nya. Sensor ini bekerja berdasarkan sinyal pantul (echo) yang ditangkap oleh penerima denganoutput berupa lebar pulsa (TTL). Pada sistem ultrasonic data jarak yang terukur adalah sebanding dengan lama waktu antara sinyal dikirim dan sinyal echo diterima. Bentuk sensorultrasonic ditunjukkan pada gambar 2.3 berikut. Gambar 2.3. Ping))) Ultrasonic Distance SensorUntuk jangkauan yang relatif jauh dapat digunakan sensor sonar jenis ultrasonic ini. Namun, sensor ultrasonic memiliki kelemahan mendasar, yaitu mudahnya terjadi interferensi antara sensor-sensor yang berdekatan dan waktu akses yang terbatas (maksimum sekitar 20 kaliscanning tiap detik). Untuk keperluan manuver kecepatan tinggi, sensor ultrasonic ini kurang sesuai. 2.4.2 Sensor Kipas Sensor Kipas digunakan untuk mendeteksi posisi kipas agar tetap pada tempatnya sehingga tidak menghalangi sensor lain. Sensor yang digunakan berupa sensor rancangan sendiri yang berbasiskan transmitter-receiver (TX-RX) infra merah– PhotoIC yang disusun secara berdampingan, sensor ini menggunakan prinsip pemantulan sinar infra merah terhadap sayap kipas yang berada di depan sensor tersebut. Sinar infra merah yang di-transmit-kan memiliki kode-kode tertentu yang dimodulasikan pada frekuensi yang tertentu pula. PhotoIC merupakan suatu modul penerima yang didalamnya telah terintegrasi oscillator, timing generator, led driver, photodiode, preamplifier, comparator, signal processing circuitdan output circuit. PhotoIC dapat memodulasi cahaya yang dipancarkan oleh pemancar (LED) dan menahan cahaya yang dihasilkan oleh pemancar yang lain. Berikut adalah gambar dari PhotoIC. Intensitas sinar infra merah yang dipancarkan unit IR transmitter diatur cukup rendah sehingga pada jarak yang telah ditentukan, hanya warna putih saja yang pantulan sinar infra merahnya akan terdeteksi oleh unit PhotoIC receiver. Apabila ada pantulan sinar infra merah dengan frekuensi modulasi dan data yang benar terdeteksi oleh unit PhotoIC receiver, maka dapat dipastikan kipas berada pada posisi yang benar, sehingga modul pengendali dapat menentukan keputusan yang sesuai dengan kondisi tersebut. 2.4.3 Sensor Api Pada robot terdapat dua jenis sensor api, yaitu pendeteksi keberadaan api lilin yang menyala dan pendeteksi posisi/arah titik api relatif terhadap arah hadap robot. Sensor-sensor tersebut diantaranya : 1. a. UVTron Flame Sensor 2. b. Phototransistor 1. a. UVTron Flame Sensor Yang bertugas mendeteksi keberadaan nyala api lilin adalah sensor api UVtron buatanHamamatsu. Sensor ini dipilih karena dalam mendeteksi keberadaan nyala api tidak terpengaruh oleh cahaya lain selain cahaya dari api. Sensor ini mendeteksi pancaran sinarultraviolet dengan rentang spektrum panjang gelombang antara 185nm hingga 260nm yang merupakan panjang gelombang ultraviolet emisi nyala api. Sensor ini juga mampu mendeteksi keberadaan nyala api dalam ruang 3 dimensi hampir dari semua arah dan dengan jarak sampai 5 meter. Gambar 2.5 merupakan gambar sensor UVtron dan modulinterface-nya: Tempat tabung UVtron Sensor UVtron dan rangkaian interface-nya memiliki filter yang mampu mengurangi noiseatau derau sehingga mengurangi kemungkinan kesalahan pembacaan keberadaan nyala api. Sensor ini mempunyai output berupa open collector dan lebar pulsa. Sensor ini dipilih sebagai sensor yang bertugas mendeteksi keberadaan nyala api lilin karena terbukti handal dalam mendeteksi api dengan jarak maksimum 5 meter dengan output sensor berupa lebar pulsa. Kelemahan dari sensor UVtron adalah tidak dapat digunakan untuk mencari letak titik api berada sehingga dibutuhkan sensor lain yang dapat mendeteksi posisi titik api lilin. 1. b. Phototransistor Phototransistor digunakan untuk mencari titik api didalam ruangan. Phototransistor bekerja dengan cara menangkap emisi ultraviolet yg dikeluarkan oleh nyala api. Gambar 2.6. Prinsip Kerja Rangkaian Phototransistor Prinsip kerja dari phototransistor adalah ketika basis menangkap cahaya dengan panjang gelombang tertentu maka collector akan terhubung dengan emitter dalam hal ini transistorbekerja. Phototransistor memiliki dua mode operasi yaitu mode aktif dan mode peralihan. Mode aktif artinya transistor akan menghasilkan reaksi yang sebanding dengan besaran cahaya yang diterima sampai dengan tingkatan tertentu. Mode peralihan artinyaphototransitor hanya akan berkondisi “off” atau “on” ketika terkena cahaya, mode ini berguna ketika dibutuhkan keluaran digital (0/1). 2.4.4 Sensor Suara Berdasarkan peraturan lomba Kontes Robot Cerdas Indonesia, robot dapat diaktifkan menggunakan sensor suara dengan frekuensi antara 3 – 4 kHz. Modul yang dirancang terdiri dari dua bagian, yaitu modul penghasil suara yang diaktifkan oleh operator robot dan modul pendeteksi suara yang terpasang pada robot. Alat yang digunakan sebagai penghasil suara adalah sebuah buzzer dengan frekuensi sekitar 3 – 4 Khz. Suara yang dihasilkan berupa sinyal analog yang akan diterima oleh komponen microphone yang kemudian di-filter melalui komponen bandpass filter sehingga menghasilkan sinyal digital. Sinyal tersebut diterima oleh mikrokontroler yang menandakan bahwa awal dari pergerakan robot. Gambar 2.7. Diagram Blok Sensor Suara 2.5. Beeper Sebagai penentu bahwa bayi telah ditemukan, digunakan modul penanda bayi disebut dengan beeper yang mengeluarkan suara dengan frekuensi 1 KHz dan menghasilkan dua beep per detik-nya sesuai dengan peraturan lomba. Modul menggunakan satu buah IC Atmel yaitu AT89C2051 dan penghasil suara digunakan sebuah buzzer. 2.6. Aktuator Aktuator merupakan perangkat elektromekanik yang menghasilkan daya gerakan. Dapat dibuat dari sistem motor listrik, sistem pneumatic, atau perangkat hidrolik. Untuk meningkatkan tenaga mekanik aktuator atau torsi gerakan dapat dipasang sistem gearbox, baik sistem direct-gear (sistem lurus, sistem ohmic/worm-gear, planetary gear, dsb) maupun sprochet-chain (gir-rantai, gir-belt, ataupun sistem wire-roller, dsb). Aktuator dasar yang sering digunakan pada sistem robot sebagai penghasil gerakan yaitu motor DC Magnet Permanen. Motor DC (direct current) adalah peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah. Berikut ini adalah sebuah contoh motor DC-MP tanpa gearbox. Gambar 2.8. Motor DC Magnet Permanen Penggunaan motor gear DC sebagai komponen penggerak didasarkan selain atas putaran dan torsi yang lebih besar dibandingkan stepper motor maupun servo motor, juga didasarkan atas ketersediaannya di pasaran dengan variasi yang banyak dan harga yang murah, walaupun tidak dilengkapi dengan data-data spesifikasi/parameter motor secara lengkap. 2.6.1 IC Motor Driver Untuk men-drive motor DC digunakan Dual Full-Bridge Driver tipe L298N Multiwatt 15 keluaran STMicroelectronics yang berisi dua buah H-Bridge yang mampu mengendalikan motor DC bertegangan kerja sampai 46 VDC dan arus total sampai 4A. Pengaturan kecepatan dan singkronisasi antara kedua motor dilakukan dengan cara pengontrolan lama pulsa aktif (metode PWM – Pulse Width Modulation) yang dikirimkan ke rangkaian drivermotor oleh modul pengendali (mikrokontroler). Lebar pulsa PWM yang dinyatakan dalamDuty Cycle menentukan kecepatan putar motor DC. Gambar 2.10 mengilustrasikan sinyal PWM versus tegangan ekivalen liniernya. Gambar 2.10. Prinsip Kerja PWM Dari Gambar 2.10 menunjukkan bahwa makin sempit pulsa PWM, tegangan ekivalen liniernya makin kecil. Jika duty cycle 100% maka tegangan ekivalen linier sama dengan tegangan maksimum pada motor. 2.6.2 Kendali Motor MMBe(Motor Mind B enhanced) adalah suatu komponen kontrol motor dc yang memiliki kemampuan untuk mengontrol satu buah motor dc. Dimana didalam nya sudah terintegrasi sistem kontrol PI (Proportional Integral). Fitur-fitur dari MMBe, diantaranya : 1. Arus Maksimal 1,75 A (6A Peak) Tegangan Antara 6-36 VDC 2. Frekuensi PWM 242Hz atau 15.5KHz 3. Serial Interface TTL 2.4 KBPS atau 9.6 KBPS 4. 0-65,535Hz tachometer 5. Kontrol kecepatan Tertutup Proportional integreted 6. Dapat dengan mudah mengakses EEPROM MMBe dapat mengontrol sebuah motor DC melalui TTL serial interace. MMBe dapat mengakomodasi boudrate 2.4 Kbps dan 9.6 Kbps, dan dapat diopeasikan menggunakanpulse-width modulation dengan frekuensi 15.5KHz. Kontrol kecepatan MMBe dapat menggunakan model increment-decrement atau menggunakan kontrol propotional integral untuk memperbaiki error, model increment akan menaikan kecepatan apabila kecepatan yang dihasilkan lebih rendah daripada kecepatan yang diinginkan sedangkan model decrement akan menurunkan kecepatan apabila kecepatan yang dihasilkan melebihi kecepatan yang diinginkan sedangkan kontrol proportional integral adalah error sinyal (frekuensi yang di inginkan dikurangan dengan frekuensi yang dihasilkan) dikalikan dengan ketetapan proportional kemudian jumlah errorselama waktu tertentu dikalikan dengan ketetapan integral dan dijumlahkan dengan hasil sebelumnya. Hasil penjumlahan tersebut berupa bilangan 32 bit komplemen 2 yang di konversi menjadi bilangan desimal antara -255 sampai +255, yang nantinya nilai tersebut digunakan sebagai nilai pengaturan kecapatan motor. Untuk menggunakan mode PI direkomendasikan untuk menggunakan frekuensi pada pengaturan 15,5 Khz . 2.6.3 Speed Encoder (a) (b) Gambar 2.12. (a) Rangkaian Internal Optocoupler dan Bentuk Fisik Optocoupler (b) Lingkaran Kertas dengan Pola Tertentu Optocoupler terdiri dari pemancar dan penerima, pada bagian pemancar terdiri atas sebuahled dengan intensitas pancaran dapat diatur dengan merubah-rubah besaran resistor (220Ω-470Ω) yang terhubung ke anodanya. Bagian penerima optocoupler adalah sebuahtrasnsistor, ketika pemancar tidak terhalangi maka output pada transistor akan berlogika 1 dan ketika pemancar terhalangi output pada transistor akan berlogika 0. Pada shaft tersebut dipasangkan suatu kertas dengan diameter tertentu yang memiliki pola hitam dan transparan. Ketika pemancar mengenai hitam (terhalang) output transistor akan berlogika 0, ketika pemancar mengenai transparan (tidak terhalang) output transistor akan berlogika 1. Bila motor diberikan catu daya dengan tegangan tertentu yang akan memutarkan motor, bacaan dari optocoupler akan mengasilkan pulsa kotak persatuan waktu. Kerapatan dari pulsa yang dihasilkan bergantung kepada kecepatan putaran motor, semakin cepat putaran motor semakin rapat pulsa yang dihasilkan.
Jumat, 10 Januari 2014
pembuatan line follower
Line Follower Robot

Line Folower atau yang dapat disebut juga Line tracer adalah sebuah robot yang bergerak sesuai dengan garis panduan. Garis panduan ini dapat berwarna putih dengan permukaan yang gelap maupun berwarna gelpat dengan permukaan yang putih. Prinsip yang digunakan dalam mendeteksi garis ialah bahwa setiap warna permukaan memiliki kemampuan yang berbeda dalam memantulkan cahaya. Warna putih memiliki daya pantul yang lebih besar dibandingkan warna hitam. Dengan konsep inilah robot dapat mendeteksi jalur.
Sensor Pada Robot
Untuk dapat menggerakkan robot digunakan jenis sensor inframerah. Untuk dapat membuat sensor ini dibutuhkan sebuah komponen Photodiode dan satu buat LED (Light Emitting Diode). LED akan memancarkan cahaya ke per mukaan dan pantulan cahayanya akan diterima oleh photodiode. Jika sensor berada diatas garis hitam maka photodioda akan menerima sedikit sekali cahaya pantulan. Tetapi jika sensor berada diatas garis putih maka photodioda akan menerima banyak cahaya pantulan.
Sumber : nujaimah.wordpress.com
astridazarine.blogspot.com
Jumat, 29 November 2013
Cara kerja remote control mirip dengan cara kerja sandi morse yang dikirim melalui mesin telegraf. Pada mesin telegraf seorang operator pengirim mengirimkan pesan teks singkat kepada operator penerima yang berada pada jarak tertentu. Namun pesan tersebut dikirimkan dalam bentuk pola kode-kode morse yang melambangkan huruf-huruf dalam pesan yang dikirimkannya. Mesin telegraf menggunakan kode tertentu karena tidak dapat mengirimkan data suara seperti pesawat telepon. Tetapi telegraf dapat mengirimkan arus listrik yang terhubung ke sebuah bel pada bagian penerima, sehingga operator penerima akan menerima suara dari bel dalam pola-pola tertentu yang apabila dirangkai akan dapat diterjemahkan sebagai pesan singkat.
Remote control menggunakan LED (Light Emitting Diode) infra merah yang berfungsi sebagai pengirim(transmitter) pola sinar infra merah. LED infra merah adalah sejenis lampu kecil yang memiliki dioda yang akan memancarkan cahaya infra merah apabila diberi arus.
Sinyal infra merah yang dikirimkan tidak akan dapat dilihat oleh mata kita, karena sinar infra merah tidak termasuk gelombang elektromagnetik pada spectrum cahaya tampak. Namun sinar tersebut dapat terbaca oleh receiver (foto transistor) yang ada pada peralatan elektronik yang menerima sinyal tersebut. Jika pola sinyal infra Red yang diterima bersesuaian dengan salah satu instruksi, seperti instruksi menurunkan volume suara pada pesawat televisi, maka volume suara pesawat televisi tersebut akan diturunkan. Jika pola sinar infra merah yang dibaca tidak dapat dikenali maka receiver akan mengabaikannya. Hal ini mungkin saja terjadi jika sebuah pesawat remote control untuk peralatan lain yang berada tidak jauh dari pesawat televisi tersebut sedang digunakan.
Bentuk kode sinyal tersebut untuk masing-masing tombol tergantung kepada perusahaan produsen peralatan elektronika. Pada dasarnya setiap perusahaan bebas menentukan kode sinyal untuk setiap tombol pada pesawat remote control, pada umumnya tidak sama antara merek A dengan merek lainnya.
Penggunaan sinyal sinar infra merah ini memang hanya cocok untuk keperluan di dalam ruang, seperti pada peralatan elektronik rumah atau kantor, karena selain memiliki keterbatasan jarak yang pendek (maksimal sekitar 10 meter), sudut pengiriman juga sangat kecil sehingga remote control harus diarahkan ke tepat ke alat elektronik tersebut. Sinar infra merah juga tidak bisa tembus dinding, sehingga harus berada pada satu ruangan.
Sumber : www.electronicglobal.com

Alat yang diciptakan oleh Dr Muhammad Rivai ST MT ini mampu menggantikan fungsi indera penciuman manusia. Terutama dalam mengenali, mengidentifikasi, dan menganalisa aroma tertentu. Memanfaatkan pola-pola algoritma neural network, temuan ini bisa jadi merupakan satu inovasi penting dalam dunia industri dan kedokteran.
Konsep yang ia ajukan adalah alat pencium elektronik yang mampu menghasilkan analisa akurat tanpa terpengaruh oleh faktor yang mungkin diderita oleh indera penciuman manusia. Jadi, tak heran bila nantinya alat ini diharapkan mampu menggantikan fungsi hidung dalam berbagai kebutuhan industri dan analisa kesehatan.
Prinsip kerja electronic nose menirukan fungsi hidung manusia, yang mana di dalamnya dijumpai berbagai reseptor pengidentifikasi aroma. "Reseptor-reseptor ini fungsinya digantikan oleh sensor pada electronic nose," ujar Dosen Teknik Elektro ITS ini. Ia menambahkan, tiap reseptor yang ada akan memberikan respon yang berbeda dari uap aroma yang sama.

Sebagai pengembangan awal, sensor electronic nose memiliki kemampuan mengidentifikasi 16 jenis aroma, di antaranya aroma apel, melati, dan peppermint. "Layaknya seorang bayi ketika dari awal sudah dilatih mampu membedakan beberapa aroma, seperti itulah cara kerjanya," kata Rivai. Proses pengenalan aroma electronic nose ini dilakukan dengan bantuan software.
Untuk alur kerja electronic nose, pria berkacamata ini menerangkan, proses diawali dengan memasukkan uap aroma ke ruang sensor, lalu uap tersebut akan diekstraksi menjadi komponen penyusun uap. Tiap komponen itu selanjutnya diukur intensitas dan konsentrasinya oleh sensor Quartz Crystal Microbalance (QCM). "Semua komponen ini saya dapatkan dari produk dalam negeri, kecuali perangkat FPGA (Field Programmable Analog Array - semikonduktor elektronik yang memiliki gerbang terprogram, Red) yang dipesan dari luar negeri," terang Rivai.
Guna menangkap uap aroma, Rivai memodifikasi osilator dan memberikan tambahan lapisan zat kimia. "Misalkan pada sensor ini, saya melapisinya dengan polyethylene glycol. Tiap sensor dilapisi dengan zat kimia yang berbeda," ujarnya. Harga bahan kimia yang digunakan pun menurut Rivai sangatlah terjangkau. "Hanya dua ribuan. Sebotol zat kimia dapat dipakai untuk ribuan sensor," imbuh Rivai.
Saat ini, electronic nose hanya dilengkapi dengan delapan sensor. "Tapi, saya sudah membuatkan tambahan sensor hingga 32 sensor. Jadi, kemampuan mengidentifikasi alat ini makin bertambah," papar peraih riset Indonesia Toray Science Foundation (ITSF) ini.
Pengembangan lebih lanjut dari electronic nose akan memberikan banyak kegunaan. Rivai menyebutkan, electronic nose dapat dikembangkan hingga ke level mampu menganalisa aroma urine yang berarti juga bisa mengidentifikasi ginjal sehat atau bakteri di saluran kencing.
Selain itu, electronic nose juga bisa diupayakan untuk mampu menganalisa aroma pernapasan seseorang. "Penelitian ini rencananya akan dikerjakan oleh beberapa mahasiswa S3 Teknik Elektro. Tujuannya untuk membantu mendiagnosa penyakit TBC yang diderita seseorang," tandas alumni Teknik Elektro ITS angkatan 1987 ini.
Satu hal yang diidamkan oleh Rivai, bila electronic nose telah sempurna, ia berkeinginan perangkat FPGA yang ter-install pada electronic nose dapat dijadikan chip. Dengan begitu, electronic nose akan berbentuk sangat kecil dan dapat dibawa kemana-mana. "Tentunya dengan tercapainya harapan saya tadi, alat ini semakin bermanfaat untuk kehidupan manusia," tuturnya
Sumber:
http://ahmadnahyudin.blogspot.com/
Jumat, 22 November 2013
Tugas Robotik Motor
Motor
Motor dibagi menjadi 3 yaitu ;
 1. Motor
1. Motor
Motor dapat diartikan sebagai penggerak. Motor berfungsi sebagai pengubah sumber energi (panas, uap, bensin, cahaya, air, listrik, dll) menjadi tenaga penggerak.Sebagai contoh: pada motor listrik: energi listrik (input) dikonversikan menjadi energi putar/gerakan berputar (output)
 Menurut perputarannya motor dibagi menjadi 2 yaitu CW dan CCW
Menurut perputarannya motor dibagi menjadi 2 yaitu CW dan CCW
a. Motor CW
CW atau Counter Wise berputar searah jarum jam
b. Motor CCW
CCW atau Counter Clock Wise putarannya berlawanan arah dengan jarum jam.
Beberapa jenis motor dapat memiliki arah putaran yang berbeda, misalnya pada motor elevator atau stepping motor pada pembuatan robot.
Gambar Motor


2. Stepper
 Motor Stepper adalah suatu motor listrik yang dapat mengubah pulsa listrik yang diberikan menjadi gerakan motor discret (terputus) yang disebut step (langkah). Satu putaran motor memerlukan 360° dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik.
Motor Stepper adalah suatu motor listrik yang dapat mengubah pulsa listrik yang diberikan menjadi gerakan motor discret (terputus) yang disebut step (langkah). Satu putaran motor memerlukan 360° dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik.
Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Pada dasar-nya terdapat 3 tipe motor stepper yaitu:
a. Motor Stepper Tipe Variable Reluctance (VR)
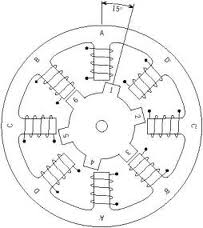 Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator

Motor dapat diartikan sebagai penggerak. Motor berfungsi sebagai pengubah sumber energi (panas, uap, bensin, cahaya, air, listrik, dll) menjadi tenaga penggerak.Sebagai contoh: pada motor listrik: energi listrik (input) dikonversikan menjadi energi putar/gerakan berputar (output)
a. Motor CW
CW atau Counter Wise berputar searah jarum jam
b. Motor CCW
CCW atau Counter Clock Wise putarannya berlawanan arah dengan jarum jam.
Beberapa jenis motor dapat memiliki arah putaran yang berbeda, misalnya pada motor elevator atau stepping motor pada pembuatan robot.
Gambar Motor
2. Stepper
Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Pada dasar-nya terdapat 3 tipe motor stepper yaitu:
a. Motor Stepper Tipe Variable Reluctance (VR)
Gambar Penggunaan Stepper

Jenis Motor Servo Motor

a. Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.

b. Motor Servo Continuous Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu)
Gambar Motor Servo

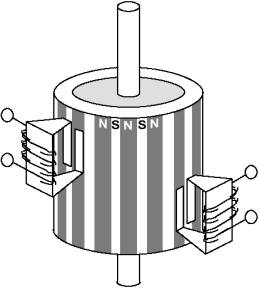
b. Motor Stepper Tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan. Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,5° hingga 15° per langkah atau 48 hingga 24 langkah setiap putarannya.
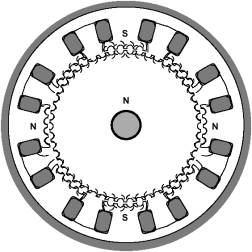
c. Motor Stepper Tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gerigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,6° hingga 0,9° per langkah atau 100-400 langkah setiap putarannya
3. Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Jenis Motor Servo Motor
a. Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
b. Motor Servo Continuous Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu)
Gambar Motor Servo

Jumat, 23 Agustus 2013
types of robot
Types of Robot
This is the second assignment
1. Humanoid Robot A humanoid robot is a robot with its body shape built to resemble that of the human body. A humanoid design might be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots may also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
A humanoid robot is a robot with its body shape built to resemble that of the human body. A humanoid design might be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots may also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
source : http://en.wikipedia.org/wiki/Humanoid_robot
2. Animaloid Robot An animaloid robot is a robot with shape built to resemble of animal. For example is the AIBO robot. Animaloid companion robots represent a very interesting paradigm. An increasing number of studies on this topic has been carried out in the past, involving such robots and older users affected by some kind of cognitive disease, from mild cognitive impairment (MCI) to more severe stages of Alzheimer's disease and other types of dementia. In the study described in this paper, an AIBO robotic dog was programmed and used to show simple reactive behaviors during the interaction with old adults. Experimental sessions were carried out with a group of 24 older subjects with cognitive deficits of relatively small entity (MMSE>23). Preliminary results seem to show the acceptability of this approach especially in subjects with a good relationship with technology. In the next future, the interaction between the robot and the old adults will be tested in more complex situations.
An animaloid robot is a robot with shape built to resemble of animal. For example is the AIBO robot. Animaloid companion robots represent a very interesting paradigm. An increasing number of studies on this topic has been carried out in the past, involving such robots and older users affected by some kind of cognitive disease, from mild cognitive impairment (MCI) to more severe stages of Alzheimer's disease and other types of dementia. In the study described in this paper, an AIBO robotic dog was programmed and used to show simple reactive behaviors during the interaction with old adults. Experimental sessions were carried out with a group of 24 older subjects with cognitive deficits of relatively small entity (MMSE>23). Preliminary results seem to show the acceptability of this approach especially in subjects with a good relationship with technology. In the next future, the interaction between the robot and the old adults will be tested in more complex situations.
source : http://www.ncbi.nlm.nih.gov/pubmed/18002332
3. Industry Robot An industrial robot is defined by ISO as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).
An industrial robot is defined by ISO as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).
source : http://en.wikipedia.org/wiki/Industrial_robot
4. Robot Riset / Robot for Research This robot is especially made for research. For example, the Mars Rover. A Mars rover is an automated motor vehicle which propels itself across the surface of the planet Mars upon arrival.Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months and they can advance the knowledge of how to perform very remote robotic vehicle control.There have been four successful robotically operated Mars rovers. The Jet Propulsion Laboratory managed the Mars Pathfinder mission and its now inactive Sojourner rover. It currently manages the Mars Exploration Rover mission's active Opportunity rover and inactive Spirit, and, as part of the Mars Science Laboratory mission, the Curiosity rover.
This robot is especially made for research. For example, the Mars Rover. A Mars rover is an automated motor vehicle which propels itself across the surface of the planet Mars upon arrival.Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months and they can advance the knowledge of how to perform very remote robotic vehicle control.There have been four successful robotically operated Mars rovers. The Jet Propulsion Laboratory managed the Mars Pathfinder mission and its now inactive Sojourner rover. It currently manages the Mars Exploration Rover mission's active Opportunity rover and inactive Spirit, and, as part of the Mars Science Laboratory mission, the Curiosity rover.
source : http://en.wikipedia.org/wiki/Mars_rover
5. Line Follower Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it. For special situations such as cross overs where robot can have more than one path which can be followed, predefined path must be followed by the robot.The line follower robot which follows black line in white area and take right turn whenever cross overs or Y shaped turn arrives. However with some minor suitable changes, users can make robot for other possibilities also.
Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it. For special situations such as cross overs where robot can have more than one path which can be followed, predefined path must be followed by the robot.The line follower robot which follows black line in white area and take right turn whenever cross overs or Y shaped turn arrives. However with some minor suitable changes, users can make robot for other possibilities also.
source : http://www.engineersgarage.com/contribution/line-follower-robot
Source:http://notesofmylifejourney.blogspot.com/2013_08_01_archive.html
This is the second assignment
1. Humanoid Robot
A humanoid robot is a robot with its body shape built to resemble that of the human body. A humanoid design might be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots may also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.source : http://en.wikipedia.org/wiki/Humanoid_robot
2. Animaloid Robot
An animaloid robot is a robot with shape built to resemble of animal. For example is the AIBO robot. Animaloid companion robots represent a very interesting paradigm. An increasing number of studies on this topic has been carried out in the past, involving such robots and older users affected by some kind of cognitive disease, from mild cognitive impairment (MCI) to more severe stages of Alzheimer's disease and other types of dementia. In the study described in this paper, an AIBO robotic dog was programmed and used to show simple reactive behaviors during the interaction with old adults. Experimental sessions were carried out with a group of 24 older subjects with cognitive deficits of relatively small entity (MMSE>23). Preliminary results seem to show the acceptability of this approach especially in subjects with a good relationship with technology. In the next future, the interaction between the robot and the old adults will be tested in more complex situations.source : http://www.ncbi.nlm.nih.gov/pubmed/18002332
3. Industry Robot
An industrial robot is defined by ISO as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).source : http://en.wikipedia.org/wiki/Industrial_robot
4. Robot Riset / Robot for Research
This robot is especially made for research. For example, the Mars Rover. A Mars rover is an automated motor vehicle which propels itself across the surface of the planet Mars upon arrival.Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months and they can advance the knowledge of how to perform very remote robotic vehicle control.There have been four successful robotically operated Mars rovers. The Jet Propulsion Laboratory managed the Mars Pathfinder mission and its now inactive Sojourner rover. It currently manages the Mars Exploration Rover mission's active Opportunity rover and inactive Spirit, and, as part of the Mars Science Laboratory mission, the Curiosity rover.source : http://en.wikipedia.org/wiki/Mars_rover
5. Line Follower
Line follower is an autonomous robot which follows either black line in white are or white line in black area. Robot must be able to detect particular line and keep following it. For special situations such as cross overs where robot can have more than one path which can be followed, predefined path must be followed by the robot.The line follower robot which follows black line in white area and take right turn whenever cross overs or Y shaped turn arrives. However with some minor suitable changes, users can make robot for other possibilities also.source : http://www.engineersgarage.com/contribution/line-follower-robot
Source:http://notesofmylifejourney.blogspot.com/2013_08_01_archive.html
types of robot
Types of Robot
This is the second assignment
1. Humanoid Robot
A humanoid robot is a robot with its body shape built to resemble that of the human body.
A humanoid design might be for functional purposes, such as interacting
with human tools and environments, for experimental purposes, such as
the study of bipedal locomotion, or for other purposes. In general,
humanoid robots have a torso, a head, two arms, and two legs, though
some forms of humanoid robots may model only part of the body, for
example, from the waist up. Some humanoid robots may also have heads
designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
2. Animaloid Robot
An animaloid robot is a robot with shape built to resemble of animal. For example is the AIBO robot. Animaloid
companion robots represent a very interesting paradigm. An increasing
number of studies on this topic has been carried out in the past,
involving such robots and older users affected by some kind of cognitive
disease, from mild cognitive impairment (MCI) to more severe stages of
Alzheimer's disease and other types of dementia. In the study described
in this paper, an AIBO robotic dog was programmed and used to show
simple reactive behaviors during the interaction with old adults.
Experimental sessions were carried out with a group of 24 older subjects
with cognitive deficits of relatively small entity (MMSE>23).
Preliminary results seem to show the acceptability of this approach
especially in subjects with a good relationship with technology. In the
next future, the interaction between the robot and the old adults will
be tested in more complex situations.
3. Industry Robot
An industrial robot is defined by ISO as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).
4. Robot Riset / Robot for Research
This robot is especially made for research. For example, the Mars Rover. A Mars rover is an automated motor vehicle which propels itself across the surface of the planet Mars upon arrival.
Rovers have
several advantages over stationary landers: they examine more
territory, they can be directed to interesting features, they can place
themselves in sunny positions to weather winter months and they can
advance the knowledge of how to perform very remote robotic vehicle
control.
There
have been four successful robotically operated Mars rovers. The Jet
Propulsion Laboratory managed the Mars Pathfinder mission and its now
inactive Sojourner rover. It currently manages the Mars Exploration
Rover mission's active Opportunity rover and inactive Spirit, and, as
part of the Mars Science Laboratory mission, the Curiosity rover.
5. Line Follower
Line follower is an autonomous robot which
follows either black line in white are or white line in black area.
Robot must be able to detect particular line and keep following it. For
special situations such as cross overs where robot can have more than
one path which can be followed, predefined path must be followed by the
robot.The line follower robot which follows black line in white area and take right turn whenever cross overs or Y shaped turn arrives. However with some minor suitable changes, users can make robot for other possibilities also.
Source: http://notesofmylifejourney.blogspot.com/2013_08_01_archive.html
Langganan:
Komentar (Atom)